 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePLaMo 2.1-VL Technical Report
Apr 21, 2026We introduce PLaMo 2.1-VL, a lightweight Vision Language Model (VLM) for autonomous devices, available in 8B and 2B variants and designed for local and edge deployment with Japanese-language operation. Focusing on Visual Question Answering (VQA) and Visual Grounding as its core capabilities, we develop and evaluate the models for two real-world application scenarios: factory task analysis via tool recognition, and infrastructure anomaly detection. We also develop a large-scale synthetic data generation pipeline and comprehensive Japanese training and evaluation resources. PLaMo 2.1-VL outperforms comparable open models on Japanese and English benchmarks, achieving 61.5 ROUGE-L on JA-VG-VQA-500 and 85.2% accuracy on Japanese Ref-L4. For the two application scenarios, it achieves 53.9% zero-shot accuracy on factory task analysis, and fine-tuning on power plant data improves anomaly detection bbox + label F1-score from 39.7 to 64.9.
Meta Learning as Bayes Risk Minimization
Jun 02, 2020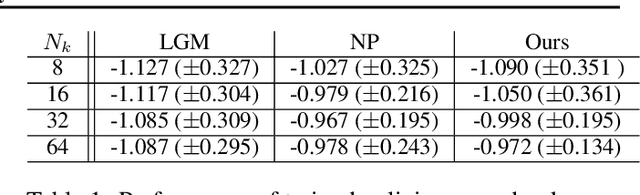
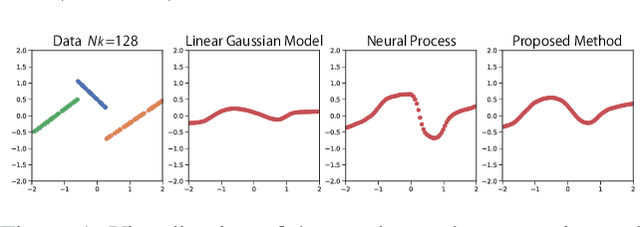
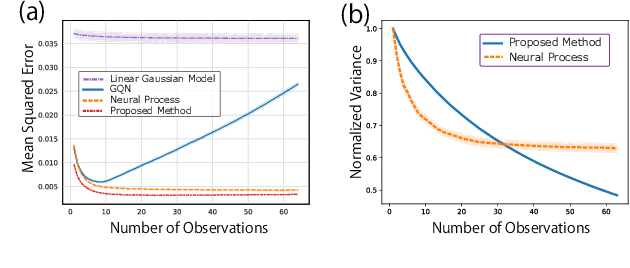
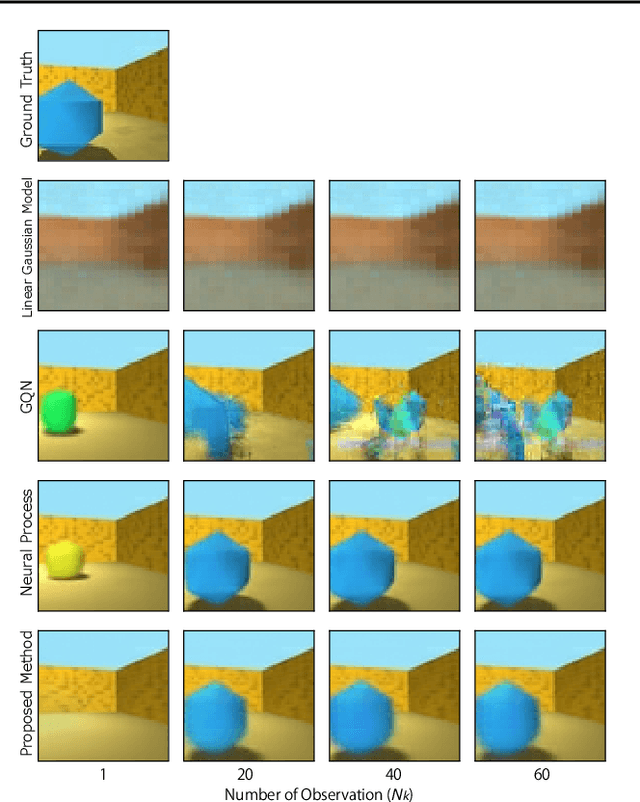
Meta-Learning is a family of methods that use a set of interrelated tasks to learn a model that can quickly learn a new query task from a possibly small contextual dataset. In this study, we use a probabilistic framework to formalize what it means for two tasks to be related and reframe the meta-learning problem into the problem of Bayesian risk minimization (BRM). In our formulation, the BRM optimal solution is given by the predictive distribution computed from the posterior distribution of the task-specific latent variable conditioned on the contextual dataset, and this justifies the philosophy of Neural Process. However, the posterior distribution in Neural Process violates the way the posterior distribution changes with the contextual dataset. To address this problem, we present a novel Gaussian approximation for the posterior distribution that generalizes the posterior of the linear Gaussian model. Unlike that of the Neural Process, our approximation of the posterior distributions converges to the maximum likelihood estimate with the same rate as the true posterior distribution. We also demonstrate the competitiveness of our approach on benchmark datasets.
Graph Residual Flow for Molecular Graph Generation
Sep 30, 2019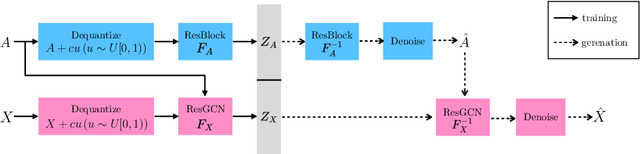
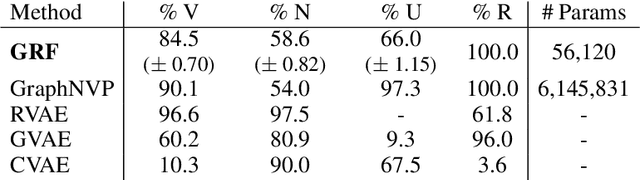
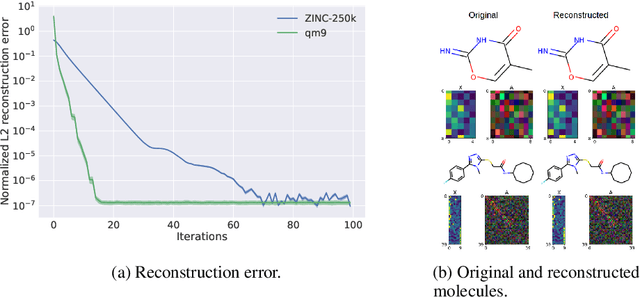
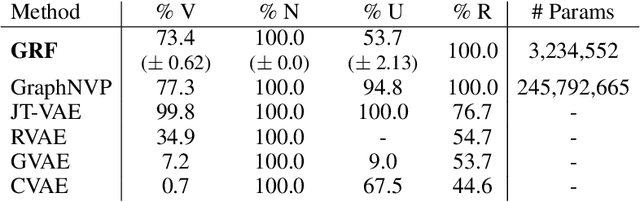
Statistical generative models for molecular graphs attract attention from many researchers from the fields of bio- and chemo-informatics. Among these models, invertible flow-based approaches are not fully explored yet. In this paper, we propose a powerful invertible flow for molecular graphs, called graph residual flow (GRF). The GRF is based on residual flows, which are known for more flexible and complex non-linear mappings than traditional coupling flows. We theoretically derive non-trivial conditions such that GRF is invertible, and present a way of keeping the entire flows invertible throughout the training and sampling. Experimental results show that a generative model based on the proposed GRF achieves comparable generation performance, with much smaller number of trainable parameters compared to the existing flow-based model.